Questão dissertativa
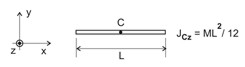
A figura abaixo representa um dispositivo robótico movendo-se num plano vertical, com aceleração da gravidade g. Na extremidade A da coluna fixa OA há um pequeno motor elétrico que aplica um momento (anti-horário) \( M_A \) na extremidade A do braço AB, fazendo este braço girar em torno de A com velocidade angular \( \omega_1 \) e aceleração angular \( \dot{ \omega }_1 \) , dados. Na extremidade B do braço AB há outro pequeno motor, que aplica o momento \( M_B \) (anti-horário) no braço BC, fazendo-o girar com velocidade angular \( \omega_2 \) e aceleração angular \( \dot{ \omega}_2 \) . A massa do braço AB é \( m_1 \), a do braço BC é \( m_2 \), e ambos podem ser considerados como hastes delgadas homogêneas.
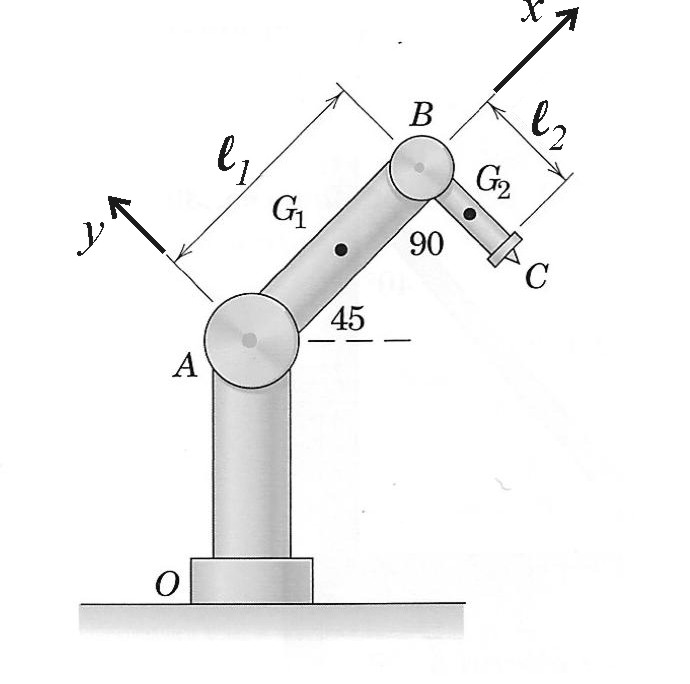
Para a posição mostrada na figura, e usando o sistema de eixos indicado, pede-se:
(a) desenhar os diagramas de corpo livre dos braços AB e BC;
(b) escrever as equações do Teorema da Resultante (TR) e do Teorema da Quantidade de Movimento Angular (TQMA) para o braço BC;
Supondo que o motor em B trave a conexão dos braços AB e BC na posição relativa mostrada, pede-se:
(c) obter as expressões de \( \omega_2, \dot{ \omega }_2, \vec{a}_{G_1}, \vec{a}_{G_2} \) em função de \( \omega_1, \dot{\omega}_1 \), das massas e das dimensões dadas na figura;
(d) determinar o momento exercido pelo braço AB sobre o braço BC.