Indice degli argomenti
-
Conteúdo das aulas:
Apresentação do curso e divisão de grupos. O grupo deve adquirir livro de apoio e trazer nas aulas.
Apresentação do programa e das bancadas.
Atividades
1) Obtenção do ganho do tacogerador Ktg [V]. O roteiro do experimento é apresentado na Seção 7.4, item 3, pag. 94.
Versão nova: Capítulo 8 Seção 8.1, item 1, pag 216 (em algumas versões, capítulo 3.1 - é a seção referente a obtenção de parâmetros de um motor CC)
Utilizar um encoder óptico. Para isto, com auxílio de um osciloscópio medir a frequência fornecida nos terminais do encoder, a qual chama-se fe e a tensão de saída do tacogerador Vtg para pelo menos 4 valores de Va. O encoder óptico da bancada possui 1024 linhas, a frequência de uma rotação do motor é dada por fe/1024. Obter também as frequências em rad/s. Apresentar os valores obtidos como na Tabela 8.6. A partir dos valores da tabela, obter Ktg como o coeficiente angular da reta Vtg versus w usando o método dos mínimos quadrados.
Tabela 8.6: Determinação de Ktg
Va (V) fe (Hz) Vtg (V) w (rad/s) Ktg (V s/rad)Obtenção da resposta de velocidade e de corrente a uma entrada degrau via ensaio de tensão para obter as constantes de tempo e ganho do motor CC (ver item 8, pag. 95).
2) Aplicar um degrau de tensão de 12V -usando a fonte de computador disponível na bancada- na armadura conectando a chave S como indicado na montagem dada na Figura 7.7 com R < 1 Ohm (Foi utilizada Rext = 0.47 \(\Omega\)). Va = 12V (teórica), Va = 12.4 V (verdadeira, medida da tensão da fonte de computador - utilizar essa para simulação).
2i) Usando um osciloscópio gravar a tensão resposta do tacogerador (vtg=Ktg \( \omega \)) e da tensão Vrext na resistência externa (rext) colocada na armadura (corrente =VRex/Rext ).
3) Construir um vetor de tempo utilizando a taxa de amostragem usada no item 1, organizar os vetores de tempo e velocidade em rad/s e utilizar a interface gráfica ident do Matlab para obter as constantes de tempo e ganho (ver arquivo pdf). Obter a função de transferência para 1a. ordem e 2a. ordem. Comparar as respostas. (Link para o bloco ident https://www.mathworks.com/help/ident/ug/how-to-estimate-transfer-function-models-in-the-system-identification-app.html. Link para estimação de função transferência https://www.mathworks.com/help/ident/ref/tfest.html)
4) Estimar os parâmetros Ra, La, B, J e Ke=Kt a partir das respostas ao degrau de corrente e velocidade usando a ferramenta Parameter Estimation.
4i) Valores iniciais motor eletrocraft: Ra=1,63 Ohm; La=3e-3 H; J=3,6e-5; B=1,12e-6 Nms/rad; Ke=0,0678 Vs/rad
4ii) Valores iniciais motor Faulhaber: Ra=2,47 Ohm; La=0,5e-3 H; J=1,1e-5; B=1,8e-3 Nms/rad; Ke=0,0673 Vs/rad
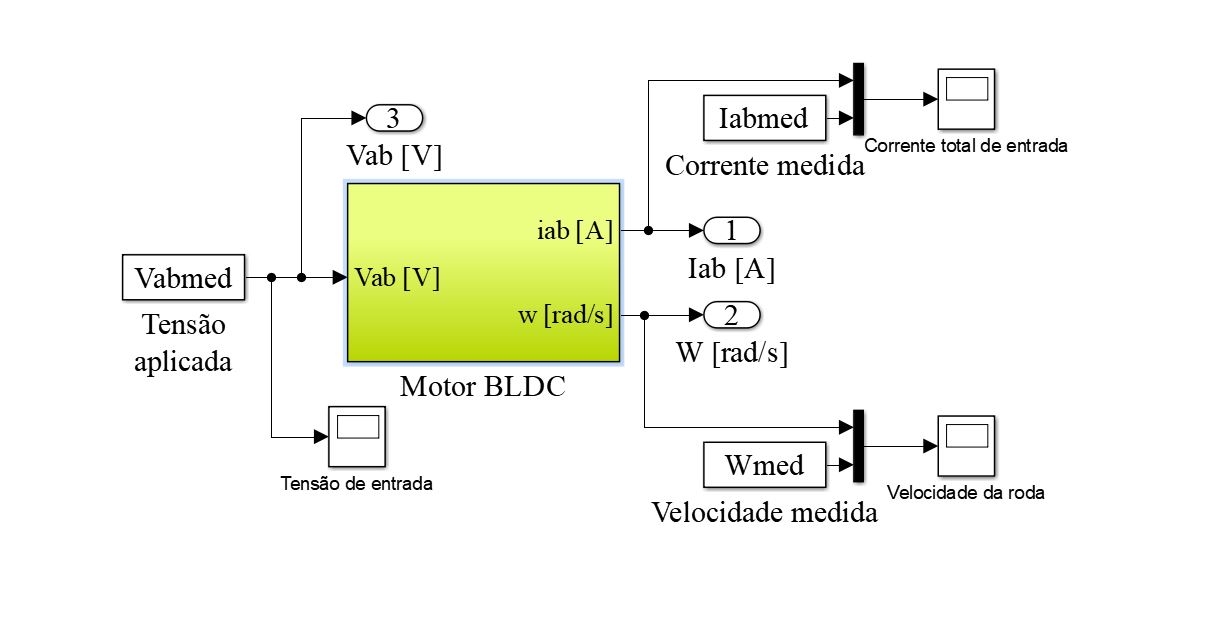
4iii) Construir o diagrama simulink do motor usando o modelo 6 (ver Seção 3.1.3, página 51 na versão nova)
 4iv)-Carregue o arquivo que contém os dados das entradas e saídas do modelo (geralmente.csv ou .txt).-Na página inicial do SIMULINK, clique em -> ‘Analysis‘ -> ‘Parameter Estimation‘-Clicar em ‘Select Parameter‘ e selecionar os parâmetros desejados-Altere o limite inferior para que seu mínimo estimado seja maior que zero.-Clique em ‘New Experiment‘. Caso tenha sido satisfeito o passo 3, a ferramenta iráidentificar a quantidade de entradas e saídas automaticamente, do contrário, deveráser indicado manualmente. Em seguida entre com o nome do vetor que será utilizadoem cada campo e clique em ’ok’. Obs: os vetores devem ser de mesmas dimensões.- Clique em ->’Add plot’ -> ’Exp_1’-Clique em ‘Plot model response‘
4iv)-Carregue o arquivo que contém os dados das entradas e saídas do modelo (geralmente.csv ou .txt).-Na página inicial do SIMULINK, clique em -> ‘Analysis‘ -> ‘Parameter Estimation‘-Clicar em ‘Select Parameter‘ e selecionar os parâmetros desejados-Altere o limite inferior para que seu mínimo estimado seja maior que zero.-Clique em ‘New Experiment‘. Caso tenha sido satisfeito o passo 3, a ferramenta iráidentificar a quantidade de entradas e saídas automaticamente, do contrário, deveráser indicado manualmente. Em seguida entre com o nome do vetor que será utilizadoem cada campo e clique em ’ok’. Obs: os vetores devem ser de mesmas dimensões.- Clique em ->’Add plot’ -> ’Exp_1’-Clique em ‘Plot model response‘Referência
Augusto Hay Mussi de Andrade, Uma proposta de frenagem regenerativa para máquina
sem escovas de corrente contínua, TCC, EESC 2017.