Área de acompanhamento
Acompanhamento
Índice analítico
1. Atividades realizadas [editar]
5. Gm= 81702/((s+830.6)*(s+60.72)) [editar]
6. %3.691e5/(s^2+913.1*s+3.491e4); [editar]
12. F=tf(8,1); [editar]
13. %ts=0.0990; [editar]
14. %Adotar ξ = 0.7, tempo de acomodação ts do sistema [editar]
15. %controlado como sendo 50% do mesmo tempo para o sistema [editar]
16. %a malha aberta utilizando a fato de que apenas a velocidade é disponível para medida. [editar]
Atividades realizadas [editar]
| Parâmetro | Imagem (se houver) | Valor | Observações |
|---|---|---|---|
| Ktg | |||
| Modelo Primeira Ordem | |||
clear all [editar]
close all [editar]
s=tf('s'); [editar]
Gm= 81702/((s+830.6)*(s+60.72)) [editar]
%3.691e5/(s^2+913.1*s+3.491e4); [editar]
kat=0.6174; [editar]
ktg=0.15402; [editar]
ka=1.1816; [editar]
G=ka*Gm; [editar]
H=tf(kat*ktg,1); [editar]
F=tf(8,1); [editar]
%ts=0.0990; [editar]
%Adotar ξ = 0.7, tempo de acomodação ts do sistema [editar]
%controlado como sendo 50% do mesmo tempo para o sistema [editar]
%a malha aberta utilizando a fato de que apenas a velocidade é disponível para medida. [editar]
S = stepinfo(G) [editar]
tslinha=S.SettlingTime %0.0657 [editar]
| Alunos | Augusto e Igor | ||
|---|---|---|---|
| Parâmetro | Imagem (se houver) | Valor | Observações |
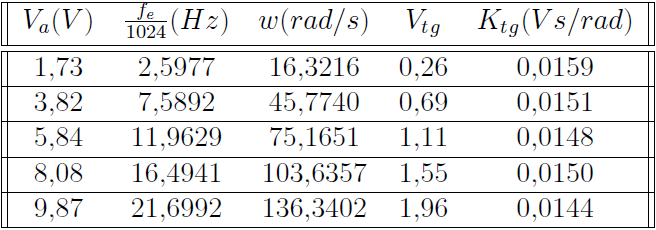
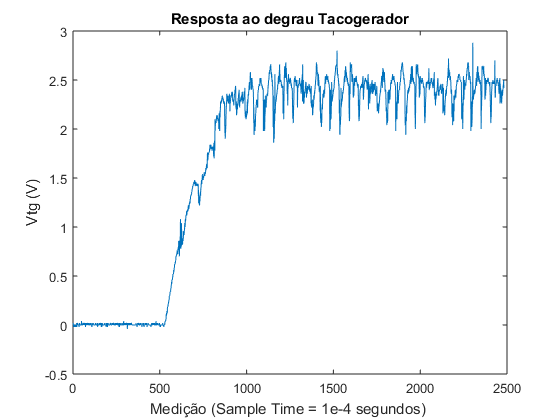
| Ktg | 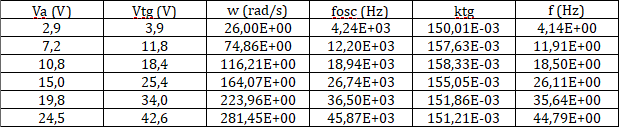  | Ktg = 154,02E-03 (Valor médio) | |
| Resposta ao degrau medida pelo tacogerador | 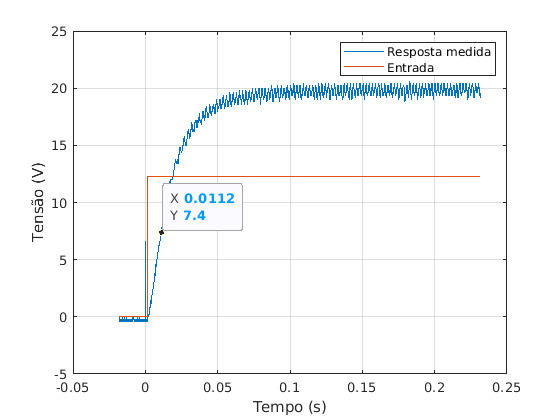 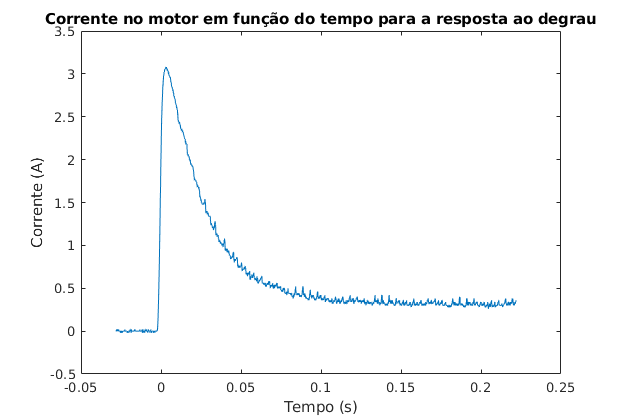 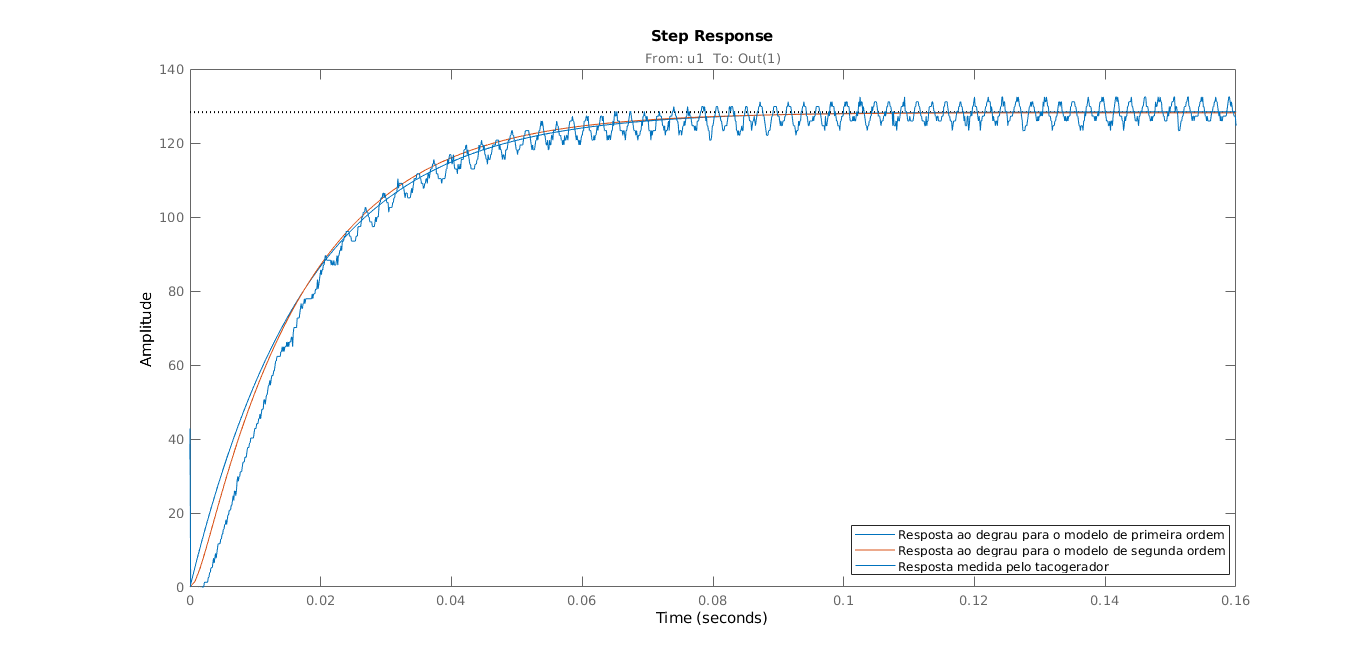 | | |
| Modelo Primeira Ordem | 90,59/(s+56,22) | ||
| Modelo segunda Ordem | 81702/[(s+830,6)(s+60,72] | ||
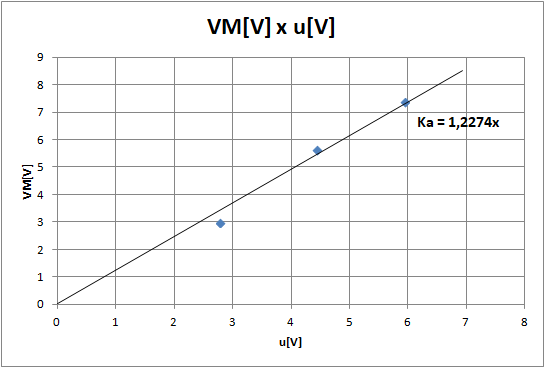
| Ka | 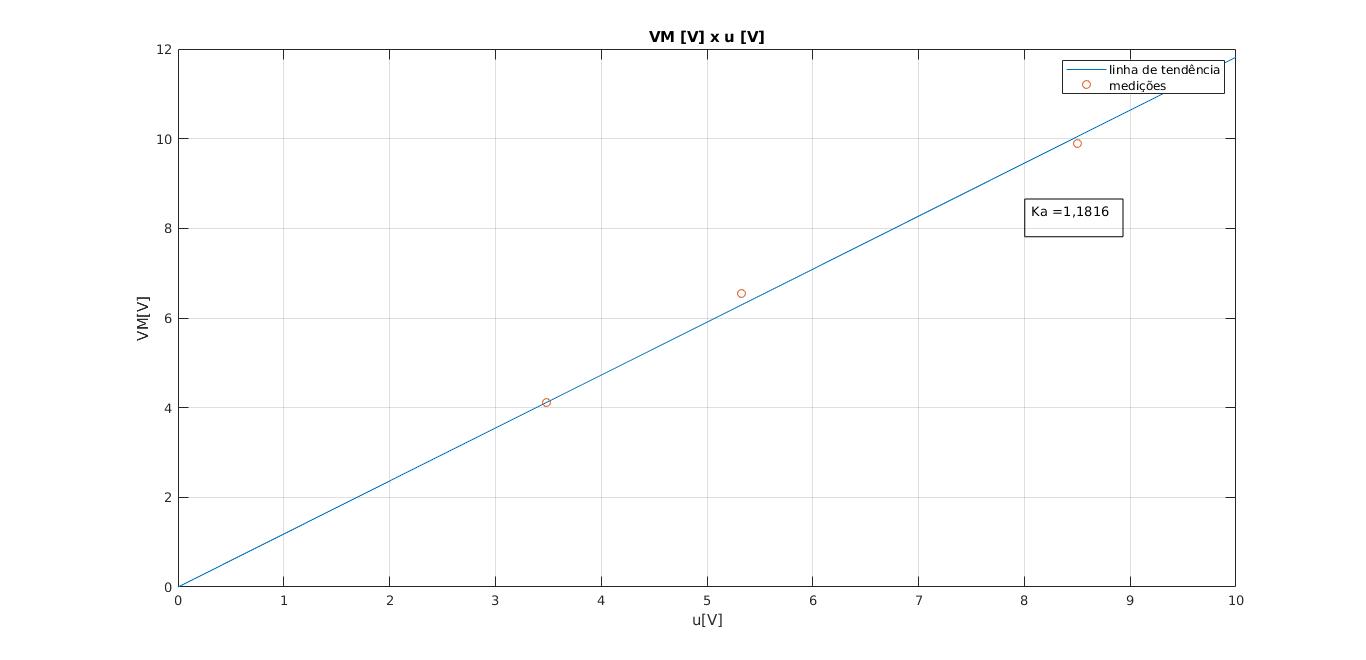 | ||
| Parâmetros estimados | Bancada: Ra = 5,7172 Ohm; La = 4,667e-5 H; J = 0,50804e-3; B = 0,6e-3 Nms/rad; Ke = 0,087 Vs/rad Mileage: Ra = 1,1051 Ohm; La = 0,0010013 | ||
| Kat | 0,6174 | ||
| ts | 0,0657 s | ||
| Zeta | 0,6901 | ||
| PI calibrado | 0,73792(s+21,71)/s 16.0202*(0.0461*s+1)/s |
1/(R3 C1)=16.0202; R4 C1=0.0461
C1=10uF, R3=6.3k Ohms; R4=4.6 k Ohms
kat=R5/R6; R6=10k; R5=6.2k
Resistências do somador 4.6k
| Parâmetro | Imagem (se houver) | Valor | Observações |
|---|---|---|---|
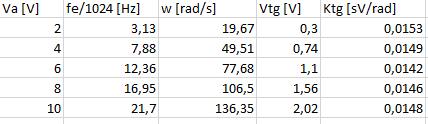
| Ktg |
| Ktg = 0,0147 | |
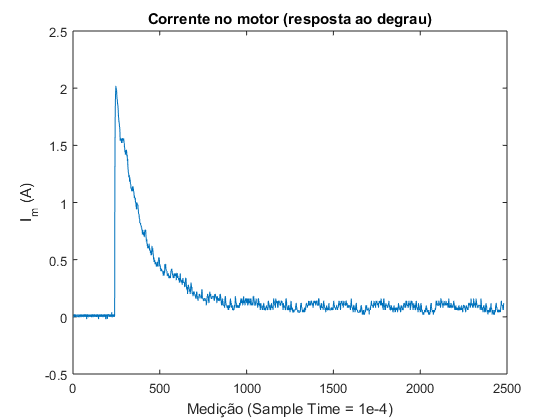
| Gráficos de tensão e corrente no motor (Resposta ao degrau) | 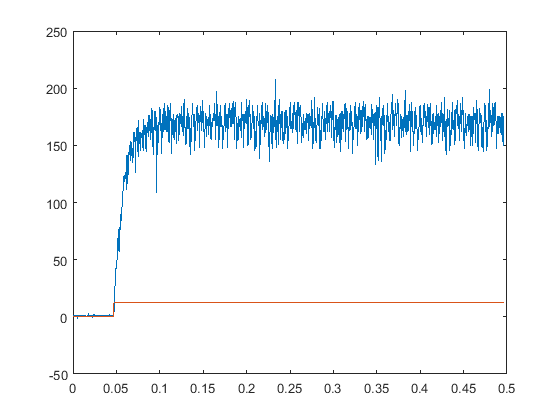 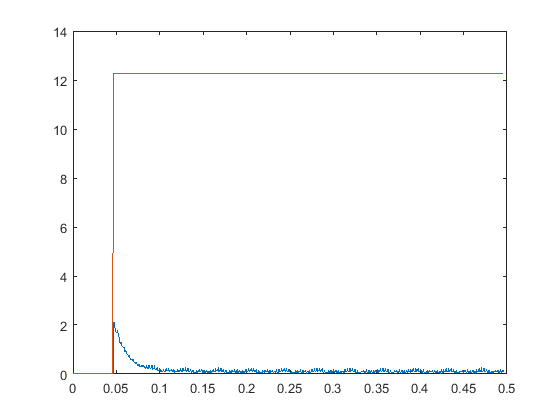 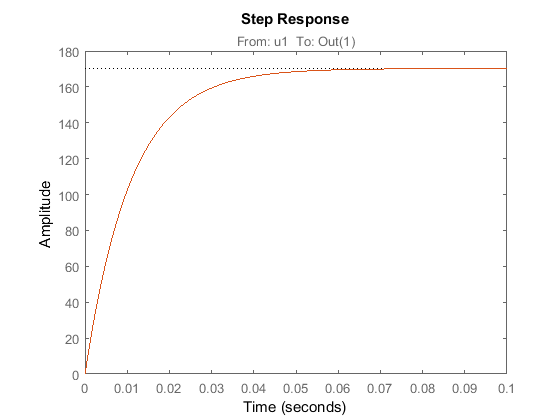 | ||
| Modelo Primeira Ordem | 1274.3/(s+91.85) | ||
| Modelo segunda Ordem | 1.2744e+9/(s+1e6)(s+91.86) | ||
| Alunos | Pedro Frizzo; Luiz Gustavo S. Martins | ||
| Ka | 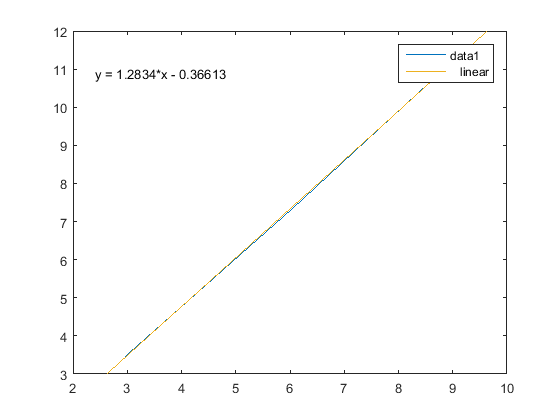 | ||
| Kat | |||
| Simulação |

| Parâmetro | Imagem (se houver) | Valor | Observações |
|---|---|---|---|
| Ktg | |||
| Modelo Primeira Ordem | |||
| Modelo segunda Ordem | |||
Turma1: Grupo 5 - Carolina Francis e Lucas Rosa
Imagem (se houver)ValorObservações Ktg
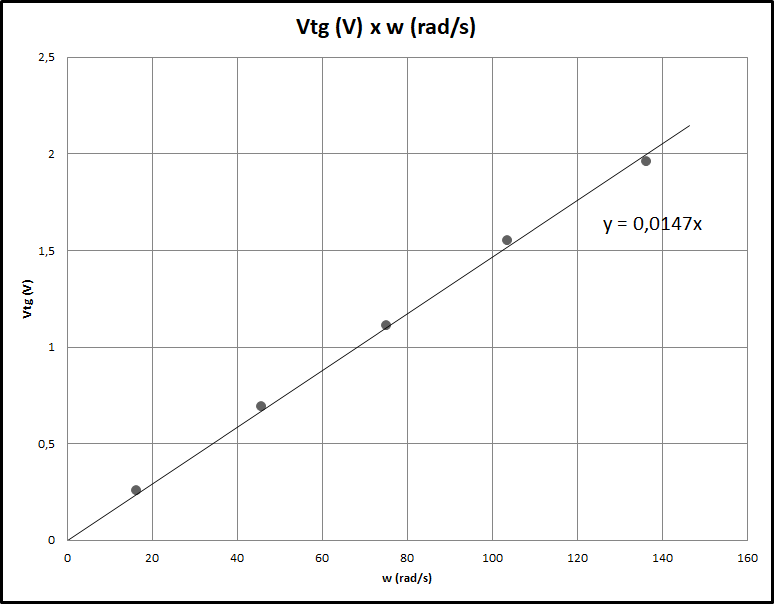
Ktg = 0,0147
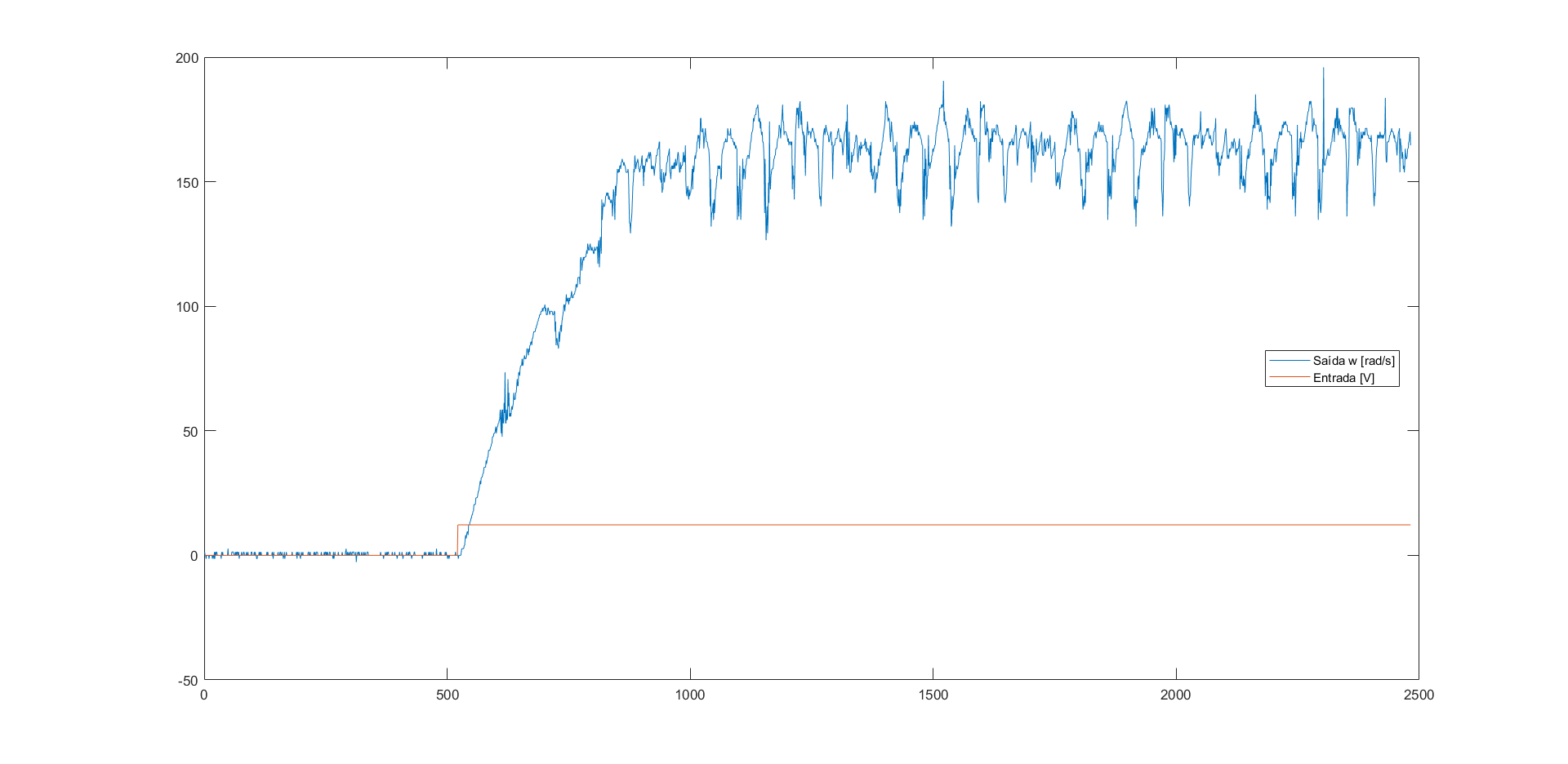
Gráficos de resposta ao degrau do tacogerador e de corrente do motor.
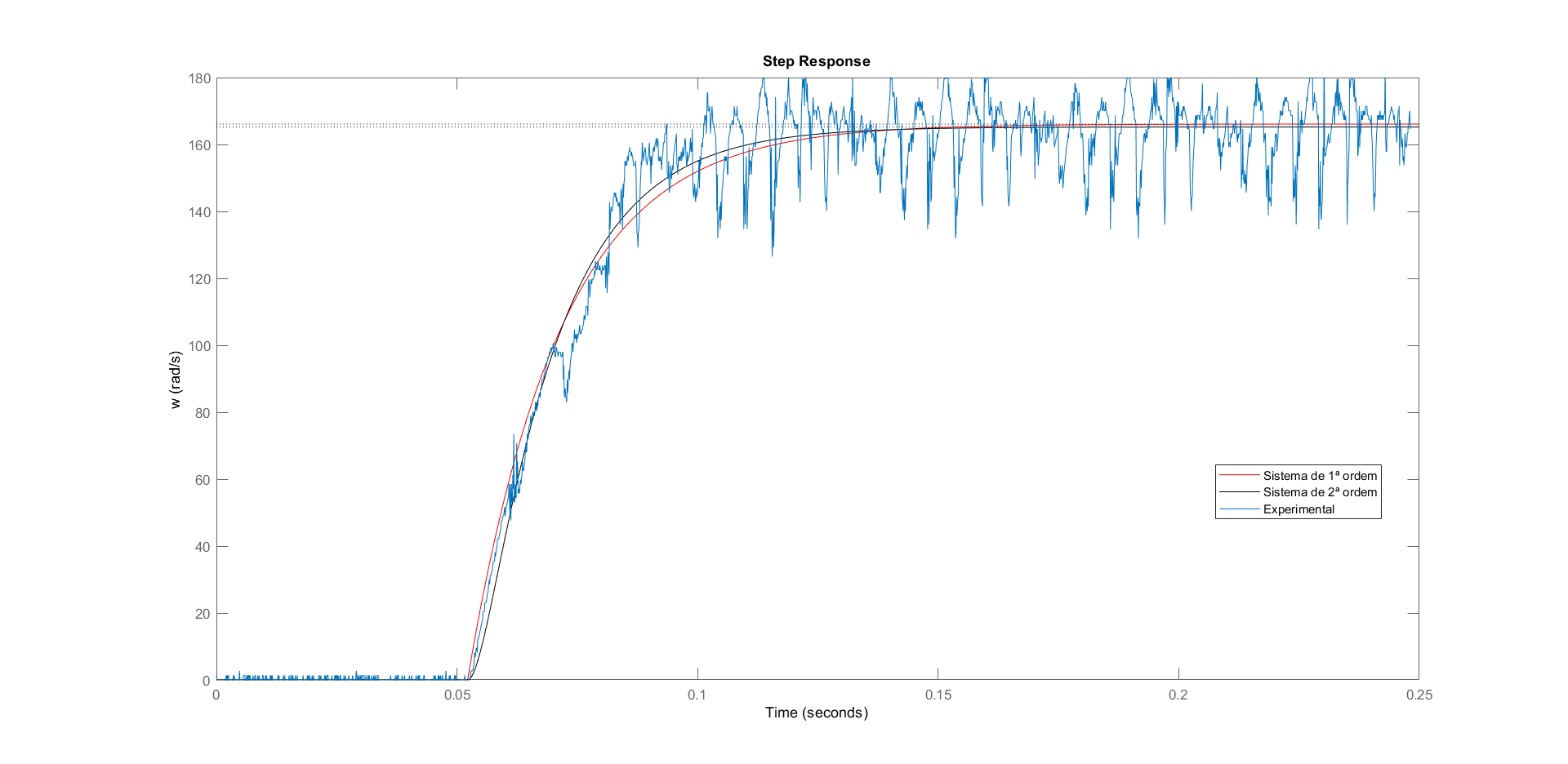
Modelo Primeira Ordem 699.33/(s+51.57) Modelo segunda Ordem 2.7071e+05/[(s+319.2)(s+62.88)] Ka
Kat = 12.225/2.412
Projeto
ESpecificações de projeto
R4C1 = 0.0094
R3C1 = 1/(1.12*106.8)
C1 = 100n
R4 = 94k
R3 = 83,6k