Grupo 1: Medição de rotação versus torque
Medição de rotação versus torque via célula de carga em dinamômetro
Medição de rotação versus torque
Aquisição de Dados em um Dinamômetro de bancada
OBJETIVO
O objetivo do teste de dinamômetro é obter curvas de Torque e Potência em função da rotação de um motor de Baja (Motor Briggs&Stratton 19L232-0054-G1), as curvas são usadas para fazer a escolha do setup que confere o melhor desempenho ao motor. A configuração do setup consiste em variar folga das válvulas (admissão e escape), folga da vela de ignição e distância do magneto ao ímã do volante de inércia.
O QUE É UM DINAMÔMETRO
O dinamômetro é um equipamento usado para obter a força, o torque ou a potência de motores em função da rotação do mesmo.
DINAMÔMETRO UTILIZADO PARA TESTES
A EESC-USP disponibilizou à Equipe EESC USP Baja o uso de um dinamômetro do tipo Eddy Current (corrente parasita) que se encontra no laboratório da termodinâmica. O funcionamento de tal dinamômetro é baseado em um freio eletromagnético, o eixo do motor é acoplado ao dinamômetro que é controlado por uma fonte de tensão. A medida que aumenta-se a tensão fornecida ao dinamômetro, aumenta-se também a força resistiva à rotação do eixo do motor, e tal resistência gera uma força que é transmitida pelo braço do dinamômetro como um momento.
DESAFIOS
Para analisar as curvas de Torque e Potência e assim poder comparar os diferentes setups do motor é necessário a aquisição eletrônica de dois parâmetros: A rotação e a força do motor em um determinado instante de tempo. Esses dados estavam sendo obtidos pela Equipe de uma forma simplória e passível de erros. A rotação do motor era obtida através de um Data Logger e a força era obtida através de uma balança de cozinha (carga máxima 10Kg), em rotações estratégicas (iniciando na rotação máxima do motor e abaixando de 300 em 300 rpm) era verificado o valor força apresentado na balança (em Kgf). Com os dados em mãos as curvas eram traçadas a partir desses pontos obtidos, o que não gerava uma curva real. Além disso, o valor da balança oscilava pois a rotação não se estabilizou perfeitamente, o que possibilitou a captação de dados incorretos.
O desafio proposto para solucionar tal questão foi a utilização de um programa desenvolvido pela equipe para ler a rotação do motor e cruzar com os dados da força obtidos, agora, através de uma célula de carga.
AQUISIÇÃO DA FORÇA DO MOTOR
Com o intuito de captar a força aplicada pelo motor, foi decidido por usar uma célula de carga no final do braço do dinamômetro. Como mostrado na figura 1.

Figura 1: Dinamômetro com Célula de carga.
A célula de carga utilizada envia os dados por uma porta serial P2 no protocolo UART RS-232, sendo possível escolher duas frequências diferentes 1,67hz ou 5hz. Além disso, o dado enviado é uma palavra com 16 caracteres que possui palavra inicial e final, informações do sentido da força, do algarismo significativo da leitura, da unidade utilizada e do módulo da força aplicada. O padrão pode ser visto na figura 2.
A palavra tem formato:
|
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
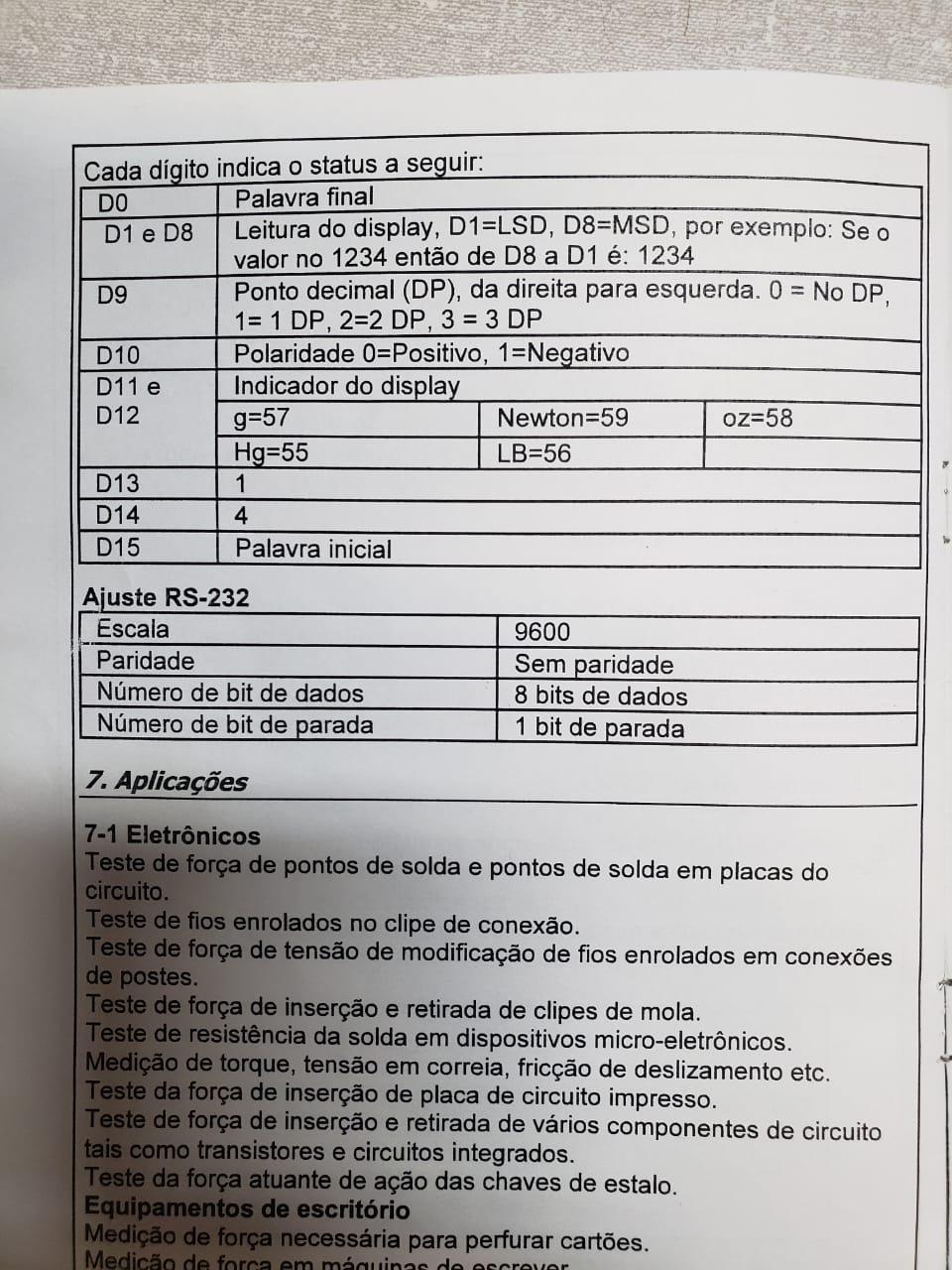
Figura 2: Dados Célula de carga.
Para a leitura da comunicação serial foi utilizado o PIC 18F4550, que possui uma porta serial no protocolo UART TTL. Visando a conversão do sinal UART RS-232, enviado pela célula, para o sinal UART TTL, lido pelo PIC, foi utilizado o circuito integrado MAX232 montado de acordo com a figura 3. Ademais, a montagem final da protoboard utilizada para a aquisição dos dados da célula pode ser vista na figura 4.


Figura 3: Circuito MAX232.Figura 4: Protoboard leitura da célula.
O microcontrolador foi programado de maneira a reenviar para o computador tudo que ele recebesse em sua porta serial, fornecendo os dados da figura 5. Após isso, o programa foi editado de maneira a interpretar a palavra e printar apenas o valor de força lido, fornecendo os dados da figura 6.

 Figura 5: Primeira leitura. Figura 6: Leitura corrigida.
Figura 5: Primeira leitura. Figura 6: Leitura corrigida.
O valor da força obtida pela célula de carga é dada em Newton (N), as operações para obtenção do Torque e da Potência são descritas a seguir:
Torque = (Força ×0,101972) ×b [Kgf.m]
onde: b = 0,86 m (braço do dinamômetro)
Potência = (Torque × Rotação) ÷ 726,3692 [hp]
AQUISIÇÃO DA ROTAÇÃO DO MOTOR
Hardware:
Para cada rotação do motor, o magneto do motor induz uma corrente no cabo da vela. Assim para captar a rotação um cabo é enrolado ao redor do cabo da vela, dessa maneira a corrente induzida pelo magneto induz uma tensão no cabo que está enrolado. O sinal que vem do motor é muito ruidoso e possui uma alta tensão, por tanto é necessário o tratamento do sinal antes de sua leitura pelo PIC.
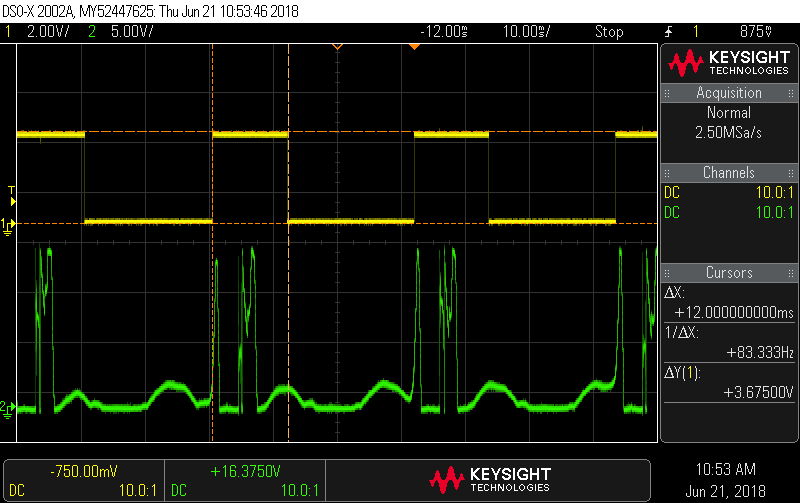
 O sinal que vem do motor passa primeiramente em um amplificador operacional no modo comparador, no qual valores menores que 3 V têm como saída 0 V e valores maiores que 3 V tem como saída 5 V. A análise do sinal antes e depois do Amp Op pode ser vista na figura 7. Após passar pelo Amplificador operacional, o sinal passar por um optoacoplador para a proteção e isolamento do circuito.
O sinal que vem do motor passa primeiramente em um amplificador operacional no modo comparador, no qual valores menores que 3 V têm como saída 0 V e valores maiores que 3 V tem como saída 5 V. A análise do sinal antes e depois do Amp Op pode ser vista na figura 7. Após passar pelo Amplificador operacional, o sinal passar por um optoacoplador para a proteção e isolamento do circuito.
Figura 7: Sinal motor pré (verde) e pós (amarelo) Amp Op osciloscópio.
Analisando a imagem que contém o sinal de duas rotações, pode-se perceber que o fato o Amp Op considerar tensões menores que 3 V como 0 V já filtra parte dos ruídos (ruído 1). Contudo, um sinal de rotação ainda passa como vários picos de 5 V depois do Amp Op. Por isso, foi necessário o uso de um último filtro, um monoestável, para transformar os vários picos de uma rotação em apenas um único pico.
 O monoestável, após receber uma borda de subida, mantém o sinal em alto por um período de tempo (setado por hardware), com isso, depois da primeira borda de subida o sinal foi setado para permanecer em alto por um tempo maior que o tempo em que ocorre os vários picos de uma mesma rotação, gerando, assim, a equivalência um pico para uma rotação como mostrado na figura 8.
O monoestável, após receber uma borda de subida, mantém o sinal em alto por um período de tempo (setado por hardware), com isso, depois da primeira borda de subida o sinal foi setado para permanecer em alto por um tempo maior que o tempo em que ocorre os vários picos de uma mesma rotação, gerando, assim, a equivalência um pico para uma rotação como mostrado na figura 8.
Figura 8: Sinal motor pré Amp Op (verde) e pós monoestável (amarelo) osciloscópio.
Com o sinal tratado, é possível conectá-lo a uma perna do microcontrolador e processar o sinal, transformando-o em um valor em Rotações Por Minuto.
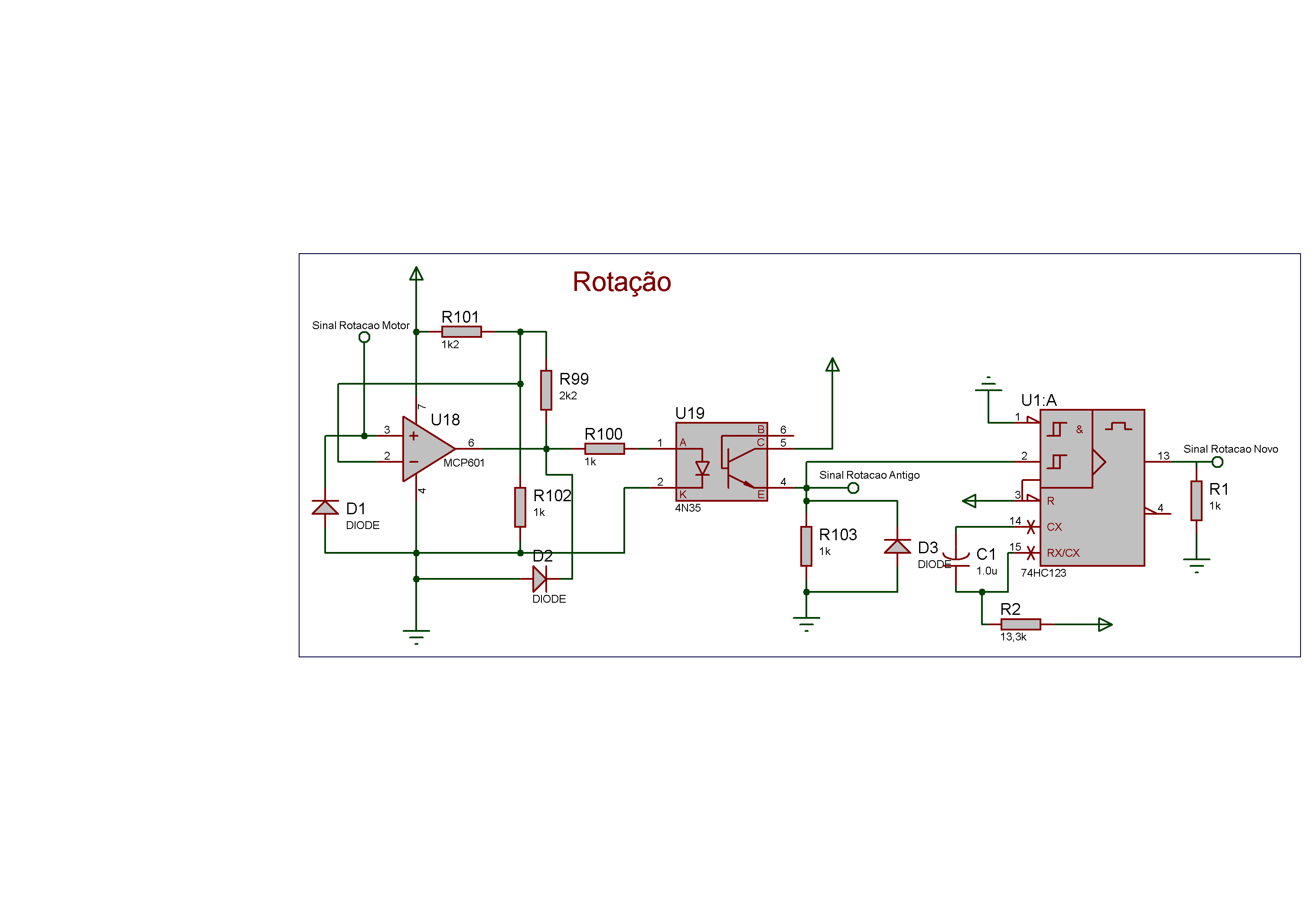
Figura 9: Esquemático Circuito da rotação.
Software:
Para a programação do microcontrolador foram desenvolvidos dois programas. O primeiro utiliza as interrupções do timer (TMR0) e de borda de subida (INT2). A ideia por trás desse programa é setar o timer de maneira que ele estoure em espaços curtos de tempo, e contar o número de estouros entre cada interrupção do INT2. Assim, com o tempo de cada estouro do timer e o número de estouros entre cada rotação, obtém-se o tempo entre cada rotação e, por fim, a frequência em RPM. Já o segundo utiliza as interrupções do timer (TMR3) e do módulo CCP (RC2). A ideia por trás do segundo programa é usar o módulo CCP para capturar os valores dos bytes de contagem do timer de duas rotações consecutivas. Desse modo, fazendo a diferença entre os valores é possível calcular o tempo entre as duas rotações e, por fim, a frequência em RPM.
|
Programa |
1º |
2º |
|
Vantagens |
Boa precisão em baixas frequências |
Precisão nos dados, principalmente em altas frequências ( > 1200RPM) |
|
|
Programação mais simples |
|
|
Desvantagens |
Baixa precisão em frequências mais altas |
Programação mais complexa |
JUNÇÃO DOS DADOS DA FORÇA E DA ROTAÇÃO
Para a sincronização dos dois dados foi necessário o uso da interrupção do pino RX do PIC18F4550 para que a leitura do dado da célula de carga não atrapalhasse na conta da rotação. Gerando, assim, dados confiáveis e a possibilidade construção de gráficos de desempenho do motor (Potência [hp] x Rotação [RPM]).

Gráfico 1: Gerado pelo 1º programa.

Gráfico 2: Gerado pelo 2º programa.
Observando os gráficos é possível perceber que segundo programa produz um gráfico com pontos menos espalhados, portanto um gráfico mais confiável.

Figura 10: Montagem final do dinamômetro.