Cinemática
Cinemática: elementos geométricos e analíticos necessários à descrição do movimento, sem se preocupar com suas causas. Curvas espaciais descreverão trajetórias. Trajetórias serão descritas em sistemas de coordenadas. Movimento será descrito pelos vetores posição,
velocidade e aceleração. Taxas de variação serão descritas por derivadas. Espaço percorrido será descrito por integrais.
4. Distância percorrida (Integral)
4.1. Estratégia
A Figura 1 ilustra a estratégia para construirmos uma ferramenta algébrica para calcular a distância percorrida (ou comprimento) \(\Delta S\) sobre uma dada trajetória $\gamma(t)$, com curvatura e torção, entre os pontos inicial $t_{i}=t_{0}$ e final
$t_{f}=t_{N}$. Estamos identificando pontos na trajetória por valores do parâmetro $t$ (tempo). Naturalmente, a distância percorrida $\Delta S$ é maior que a distância entre os pontos inicial e final dada pelo comprimento $\|\vec{R}\|$ do vetor diferença
entre estes dois pontos, $\vec{R}=\vec{r}_{f}-\vec{r}_{i}$.
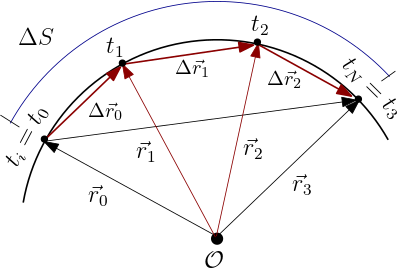
No entanto, apesar do fato $\Delta S> \|\vec{r}_{f}-\vec{r}_{i}\|$, está aí a semente de uma ideia frutífera: inserir pontos intermediários como $t_{1}$ e $t_{2}$ mostrados na Figura 1, por exemplo, e observar que a soma dos comprimentos das diferenças
sucessivas entre os vetores posição em $t_{0}$, $t_{1}$, $t_{2}$ e $t_{N}$ ($N=3$), é uma aproximação muito melhor para a distância percorrida,
onde
Note que estamos trocando a soma nos arcos (pequenos trechos na trajetória) pela soma nas cordas (comprimentos das diferenças vetoriais).
Desta forma, a soma dos comprimentos das diferenças sucessivas entre os vetores posição de $N$ pontos sobre a trajetória é uma aproximação inferior para a distância percorrida. No limite $N\to\infty$ devemos obter uma igualdade,
Como tornar este limite operacional? O que ganhamos trocando a soma nos arcos pela soma nas cordas? Ganhamos muito! O comprimento $\|\Delta\vec{r}_{j}\|$ de cada corda pode ser expresso em termos da velocidade (média),
Note que $v_{i}=v(t_{i})$ é na verdade uma velocidade média, mas será a velocidade instantânea no limite $\Delta t\to 0$. Lembre-se que $N\to\infty$ é equivalente a $\Delta t\to 0$. Assim, a distância percorrida pode ser calculada pelo limite
A nossa capacidade em executar estas somas infinitas é simplesmente incrível.