Cinemática
Cinemática: elementos geométricos e analíticos necessários à descrição do movimento, sem se preocupar com suas causas. Curvas espaciais descreverão trajetórias. Trajetórias serão descritas em sistemas de coordenadas. Movimento será descrito pelos vetores posição,
velocidade e aceleração. Taxas de variação serão descritas por derivadas. Espaço percorrido será descrito por integrais.
3. Taxas (Derivadas)
3.1. Velocidade
A taxa de variação do vetor posição é denominada de velocidade. A velocidade é um vetor e uma função do tempo \(t\). A construção desse vetor velocidade está ilustrada na Figura 1. Nesta figura, o
ponto na trajetória designado por $t$ está fixo, enquanto o ponto designado por $t+\Delta t$ está livre, com $\Delta t\geq 0$.
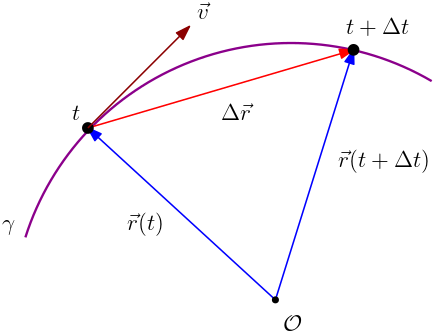
Seja $\Delta\vec{r}$ a diferença entre os vetores posição destes dois pontos,
Agora, num processo contínuo e suave, levemos o ponto designado por $t+\Delta t$ para as proximidades do ponto (fixo) designado por $t$. O parâmetro $t$ pode ser escolhido de tal forma que $\Delta t\to 0$ numa vizinhança muito pequena em torno do ponto
designado por $t$.
- Definição 1 (Velocidade)
- A taxa de variação do vetor posição, ou velocidade, é uma função vetorial definida pelo processo limite \begin{equation} \label{eq:vec-v} \vec{v}(t)=\lim\limits_{\Delta t\to 0} \frac{\Delta\vec{r}}{\Delta t}\equiv \frac{d\vec{r}}{dt}\equiv \dot{\vec{r}}, \quad (\ast)\end{equation} conhecido por derivada primeira.
Designaremos as coordenadas do vetor velocidade por $v_{i}(t)$ ou $\dot{x}_{i}(t)$, com $i\in\{x,y,z\}$ ou $i\in\{1,2,3\}$, dependendo da conveniência. Reservaremos o ponto (e somente o ponto) sobre o nome para representar a primeira derivada temporal
(e somente a derivada temporal, i.e., em relação ao tempo $t$, $dx/dt=\dot{x}$). Veja o Cap. 2 do Livro Apêndices para um guia sobre derivadas
para iniciantes.
Interpretação geométrica. A interpretação geométrica do vetor velocidade está na Figura 1. Antes do processo limite $\Delta t\to 0$, a direção do vetor diferença $\Delta\vec{r}$ é uma reta
secante, i.e., ela passa por dois pontos na trajetória. Após processo limite $\Delta t\to 0$, a direção do vetor velocidade é uma reta tangente, pois tem apenas um ponto de contato com a curva $\gamma$ que representa a trajetória. A direção tangente
definida por esse processo é única. A direção do vetor velocidade é tangente à trajetória. Assim, devemos sempre colocar o vetor velocidade iniciando na posição do objeto e na direção tangente à trajetória,
como mostrado na Figura 1. Bom lembrar que o vetor posição inicia sempre na origem do sistema de coordenadas (ponto $\mathcal{O}$).
Análise dimensional. Veja o Cap. 1 do Livro Apêndices para uma introdução à Análise
Dimensional. Uma análise dimensional do vetor velocidade mostra que suas dimensões são as mesmas de comprimento por tempo, $[\vec{v}]=[dx/dt]=\text{L}/\text{T}$. Note que estamos tratando as diferenciais $dx$ e $dt$ como quantidades (infinitesimalmente
pequenas) com as dimensões de comprimento e tempo, respectivamente. Lembre sempre que velocidade é um vetor, por definição, com dimensões de comprimento por tempo. Livre-se da concepção adquirida que velocidade é "espaço por tempo", a qual contém dois
erros graves: velocidade não é um escalar (espaço) e "espaço" é muito mais que o comprimento entre dois pontos num espaço. Usar "espaço percorrido por tempo gasto" não ajuda muito, mesmo se interpretar "espaço percorrido" como a distância percorrida
ou comprimento do trajeto. Velocidade é um vetor, por definição, e, como tal, deve ser grafado (com a flecha).
Rapidez. Denominaremos por rapidez o módulo do vetor velocidade,
Note que estamos usando a Propriedade 4 do produto escalar numa base ortonormal. Note também que a rapidez é um escalar, diferentemente da velocidade (um vetor). Veremos que a rapidez terá um papel importante no cômputo do comprimento de um trajeto.
Exemplo. Sim, um exemplo. Seja a trajetória circular no plano $z(t)=0$ dada pela forma paramétrica
sendo $\theta$ a fase dada por
onde $\omega$ é um parâmetro conhecido por frequência angular, $\varphi$ é a constante da fase e $R$ é o raio (igual ao comprimento do vetor posição). Então a Definição 1 nos permite calcular o vetor velocidade
Efetuando as derivadas temporais, teremos
Esse vetor velocidade tem algumas características interessantes. Ele é perpendicular ao vetor posição, $\vec{r}\cdot\vec{v}=0$, e seu módulo é constante, $v=\|\vec{v}\|=\omega R$. Resultado conhecido? Agora sabe de onde veio. Verifique. Sempre
que obtiver resultados algébricos, como esses, use análise dimensional para checar a consistência de seus resultados. Quais são as dimensões do parâmetro $\omega$? Como a fase (argumento de uma função trigonométrica) deve ser adimensional, então a dimensão
da frequência angular $\omega$ deve ser inverso de tempo, $[\omega]=1/\text{T}$. Desta forma, tanto a velocidade quanto a rapidez estão com as dimensões corretas, $[v]=[\omega R]=\text{L}/\text{T}$.
Exercício 1. Determine o vetor velocidade, e seu módulo, de um objeto na trajetória no plano $z=0$ dada pela curva (círculo) na forma paramétrica \begin{equation} x(t)=R\cos(\omega t),\quad y(t)=R\sin(\omega t), \end{equation} onde $R$ é o raio. Mostre que o vetor velocidade é sempre perpendicular ao vetor posição.
Exercício 2. Determine o vetor velocidade, e seu módulo, de um objeto na trajetória no plano $z=0$ dada pela curva (parábola) na forma paramétrica \begin{equation} x(t)=2t,\; y(t)=3t-t^2,\;
0\leq t\leq 3/2. \end{equation} Observe o intervalo do parâmetro $t$ (tempo). Quais são o alcance e a altura máximas que esse objeto atinge? Em que respectivos tempos? Use o Sistema Internacional (SI) de unidades, onde comprimento está em metros (m)
e tempo em segundos (s).
Exercício 3. Determine o vetor velocidade, e seu módulo, de um objeto na trajetória dada pela curva (hélice) na forma paramétrica \begin{equation} x(t)=R\cos(\omega t),\; y(t)=R\sin(\omega
t),\; z(t)=t/2. \end{equation} onde $\omega$ e o raio $R$ são parâmetros arbitrários.