Dinâmica
2. Segunda lei
2.4. Queda livre
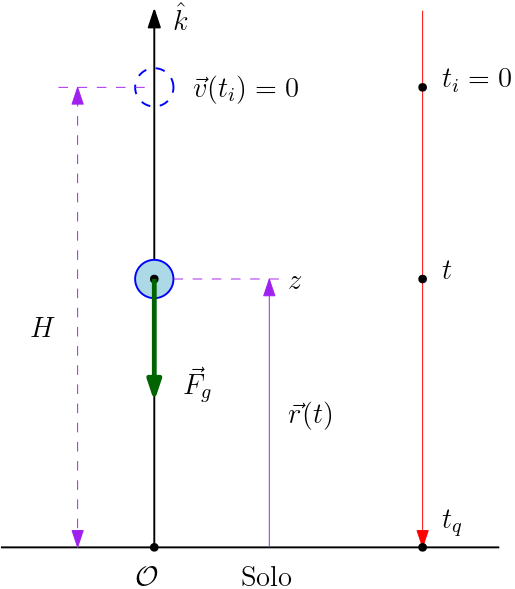
Solte do repouso, numa altura \(H\) acima do solo, um objeto de massa $m$. Este objeto está sujeito à ação da força da gravidade $\vec{F}_{g}$, dirigida ao solo. O solo está no plano XY. Como podemos verificar facilmente, a trajetória deste objeto será retilínea e
vertical (eixo Z), na qual o objeto atingirá o solo depois de algum instante. Esse fato nos sugere o sistema de coordenadas mostrado na Figura 1, onde escolhemos o eixo Z na direção da trajetória retilínea. Esta escolha é a mais simples possível.
A Figura 1 mostra o eixo temporal (meramente ilustrativo) em seu lado direito. No instante inicial $t_{i}=0$, o objeto está na altura $z(t_{i})=H$, com velocidade nula, $\vec{v}(t_{i})=0$. Quando o objeto é solto, ele entra em movimento (de "queda" ao
solo). A Figura 1 mostra também a posição $z(t)$ do objeto num instante $t>t_{i}$ qualquer. Quando o objeto atinge o solo, num instante $t_{q}$ (tempo de queda), naturalmente $z(t_{q})=0$. Este sistema mecânico é denominado de "queda livre". A única
força presente é a gravidade.
Estabelecido o melhor sistema de coordenadas (mostrado na Figura 1) e nomeado todos os parâmetros e quantidade vetoriais pertinentes, devemos escrever todos os vetores em coordenadas. Iniciando pelas condições iniciais ($t_{i}=0$), \begin{equation} \vec{r}(0)=H\hat{k},\quad \vec{v}(0)=0,\end{equation} e a força da gravidade,
\begin{equation}\vec{F}_{g}=-mg\,\hat{k},\quad g=9,8~\text{m}/\text{s}^{2}.\end{equation} Em seguida precisamos das quantidades cinemáticas num tempo qualquer $t>0$, \begin{equation}
\vec{r}(t)=z(t)\hat{k},\quad \vec{v}(t)=\dot{z}(t)\hat{k},\quad \vec{a}(t)=\ddot{z}(t)\hat{k}. \end{equation} Hora de usar a segunda lei $\vec{F}_{g}=m\vec{a}$ (massa constante) na forma de coordenadas, \begin{equation} -mg\,\hat{k}=m\ddot{z}(t)\hat{k} \implies \ddot{z}=-g,\end{equation} a qual implica em uma EDO fácil de ser resolvida. Esta EDO foi discutida na Seção Introito. Sua solução é \begin{equation} z(t)=c_{0}+c_{1}t-\frac{1}{2}gt^{2},\end{equation} cuja verificação é imediata (verifique). Assim, a componente Z do vetores velocidade e aceleração são \begin{equation} v_{z}(t)=\dot{z}(t)=c_{1}-gt,\quad a_{z}=\dot{v}_{z}=-g.\end{equation} As constantes $c_{0}$ e $c_{1}$ são determinadas pelas condições iniciais dadas, substituídas em $z(t)$ e $v_{z}(t)$, \begin{equation} v_{z}(0)=c_{1}=0\implies c_{1}=0,\end{equation} e \begin{equation} z(0)=c_{0}=H\implies c_{0}=H.\end{equation} Desta forma, a trajetória é a reta $\vec{r}(t)=z(t)\, \hat{k}$, com a equação horária \begin{equation} z(t)=H-\frac{1}{2}gt^{2}. \end{equation}
O tempo de queda $t_{q}$ é dado pelo condição (verifique) \begin{equation} z(t_{q})=H-\frac{1}{2}gt_{q}^{2}=0 \implies t_{q}=\sqrt{\frac{2H}{g}}. \end{equation} No momento em que toca o solo, a componente Z da velocidade do objeto é (verifique) \begin{equation} v_{z}(t_{q})=-\sqrt{2gH}. \end{equation} Esta é uma ótima oportunidade para checar o esquema de calcular o comprimento da trajetória entre os instantes inicial $t_{i}=0$ e final $t_{q}$, o qual sabemos ser $H$, \begin{equation}\Delta s=\int\limits_{t=0}^{t=t_{q}}\!|v_{z}(t)|\, dt=\left.\frac{g}{2}t^{2}\right|_{t=0}^{t=t_{q}}=H, \end{equation} como esperado (verifique). Note o detalhe na simplificação do módulo do vetor velocidade $\vec{v}(t)=v_{z}(t)\hat{k}$ (verifique), \begin{equation} v(t)=\|\vec{v}(t)\|= \sqrt{\vec{v}\cdot\vec{v}}= \sqrt{v_{z}^{2}(t)}= |v_{z}(t)|=gt. \end{equation}
Exercícios. Detalhe todas as passagens sinalizadas por "verifique".